您好,歡迎訪問江蘇研茂包裝自動化有限公司!
- 網(wǎng)站地圖
- 聯(lián)系我們
- 關(guān)注微信
您好,歡迎訪問江蘇研茂包裝自動化有限公司!

全國免費咨詢熱線
4008501759
免費咨詢熱線
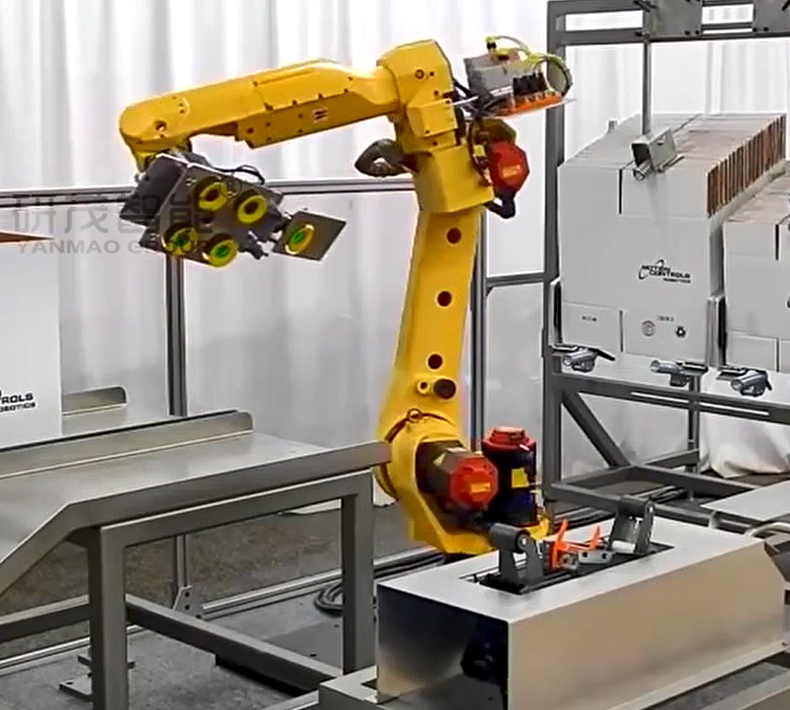
18016000798碼垛機器人是一種能夠自動化完成貨物碼垛的機器人,其主要研究內(nèi)容包括機器人的運動規(guī)劃、視覺識別、抓取技術(shù)等方面。近年來,隨著物流行業(yè)的快速發(fā)展和自動化技術(shù)的不斷進步,碼垛機器人的應(yīng)用越來越廣泛,備受關(guān)注。
一、碼垛機器人的運動規(guī)劃
碼垛機器人的運動規(guī)劃是碼垛機器人研究的重點之一。運動規(guī)劃是指根據(jù)機器人的運動學(xué)特性、工作空間、工作任務(wù)等因素,規(guī)劃機器人的運動軌跡,使其能夠高效、精準地完成任務(wù)。
在碼垛機器人的運動規(guī)劃中,需要考慮到貨物的尺寸、形狀、重量等因素,以及機器人的抓取方式、抓取力度等因素。通過對這些因素的綜合考慮,可以確定機器人的運動規(guī)劃方案,從而保證機器人能夠順利地完成碼垛任務(wù)。
二、碼垛機器人的視覺識別
容備受關(guān)注?")
碼垛機器人的視覺識別是指機器人通過視覺系統(tǒng)對貨物進行識別和定位。視覺識別是碼垛機器人研究的另一個重點。
在視覺識別方面,需要對貨物的顏色、形狀、紋理等特征進行識別。通過對這些特征的識別,可以實現(xiàn)對貨物的自動分類、定位等操作,從而提高碼垛機器人的工作效率和準確性。
三、碼垛機器人的抓取技術(shù)
碼垛機器人的抓取技術(shù)是指機器人對貨物的抓取方式和抓取力度的研究。抓取技術(shù)是碼垛機器人研究的另一個重要內(nèi)容。
在抓取技術(shù)方面,需要考慮到貨物的重量、形狀、表面材質(zhì)等因素。通過對這些因素的綜合考慮,可以確定機器人的抓取方式和抓取力度,從而保證機器人能夠穩(wěn)定地抓取貨物,并將其準確地放置到指定位置。
綜上所述,碼垛機器人的主要研究內(nèi)容包括運動規(guī)劃、視覺識別、抓取技術(shù)等方面。這些研究內(nèi)容的深入探究和不斷創(chuàng)新,將為碼垛機器人的應(yīng)用帶來更多的可能性和前景。
公司地址:江蘇省蘇州太倉市高新區(qū)蘇州中路585號洋沙工業(yè)園四號廠房 研茂集團專業(yè)提供自動包裝流水線,裝盒機,大袋包裝機,堆垛機一站式供應(yīng)商!
江蘇研茂包裝自動化有限公司 版權(quán)所有 備案號:蘇ICP備17003554號-3  蘇公網(wǎng)安備32058502010845 版權(quán)聲明 免責條款 開箱機裝箱機博客
蘇公網(wǎng)安備32058502010845 版權(quán)聲明 免責條款 開箱機裝箱機博客